Change Language :
The igus Robot Control software
Program, simulate and control robots licence-free
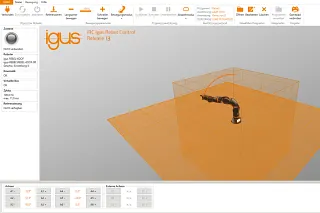
The igus Robot Control software enables simple and intuitive robot programming and control systems, making it easy to get started with automation. Thanks to the modular structure, various robot kinematics, e.g. delta robots, linear robots and multi-axis articulated robots can be controlled. The software can be used to simulate the individual movements of the robot on the 3D surface – the robot does not need to be connected for this step.
What you will find on this page
Free robot software
Programming examples of various applications with the robot software
- Simple connection between robot and control system
- Intuitive operation with 3D interface and digital twin enables direct execution and checking of motion sequences
- Camera interface configuration possible directly via control system and software
- Programming of delta, linear, SCARA and articulated arm robots
- Software enables risk-free testing even before purchase
System requirements:
- PC with Windows 10 operating system
- Communication via Ethernet or WLAN
- 500MB of free disk space
Sample programs, wiki and training courses



Interfaces
PLC interfaces
The PLC interface (PLC = Programmable Logic Controller) enables the execution of basic functions and the signalling of states by means of digital inputs and outputs. In addition to the control by a PLC, this interface also enables operation via hardware buttons.
Digital inputs and outputs
Robot programs can be loaded and started and gripper commands can be sent via digital inputs or global signals. This is useful, for example, if a program is to be selected from a given selection using buttons or the CRI-GSig instruction.
Modbus TCP/IP
The Modbus TCP interface can be used to send PLC data and instructions to the robot control system and receive status information, for example.
CRI interface
The CRI interface enables complex instructions to be sent and information and settings to be retrieved via the Ethernet interface using TCP/IP. The igus Robot Control uses this interface to connect to robots with an integrated control system or other instances of the control system.
Camera interface
The camera interface enables the use of object detection and video cameras. Object detection cameras recognise the position and class of objects and transmit these, optionally with a video image, to the control system. The control system calculates positions in the robot coordinate system from the object positions of the camera. Pure video cameras only deliver images and can therefore only be used to monitor the work area, but not to detect objects.
Cloud
The Cloud interface enables the robot to be monitored via RobotDimension. Once activated and logged in, the robot sends basic status information and camera images to the online service. The user can list their robots on the website and retrieve the information.
ROS, Matlab, LabView, and many more.
Integrate the robots into your ROS environment. Documentation and packages for hardware communication, Teleop and moveI
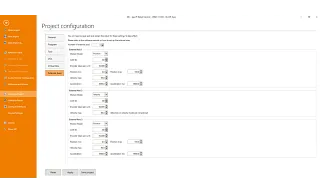
Project configurations
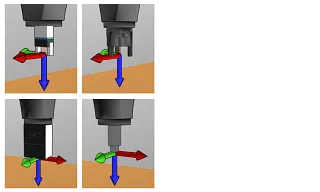
Gripper
The assembled tool can be specified here. Changing the tool requires the project to be reloaded or the integrated control system to be restarted. New tools can be defined as a configuration file in the directory "Data/Tools"
Virtual box
The range of movement of the robot arm is restricted by the settings of the virtual box. This functionality helps to prevent mechanical damage and simplifies programming, depending on the application. If a program is executed that violates the virtual box, it is stopped with an error message.
External axis
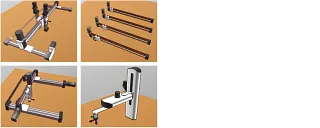
The robot control system supports up to 3 additional axes (also called "external axis" in iRC). These can be installed according to the robot axes and configured via the configuration area of iRC.

Program
Here you can define the robot and logic program, the movement speed (as a percentage of the maximum speed), the playback mode and the reaction to program errors.
Special kinematics
The robot control system can be customised for your robot with a digital twin. We configure the inverse kinematics to suit your project business.
Programming
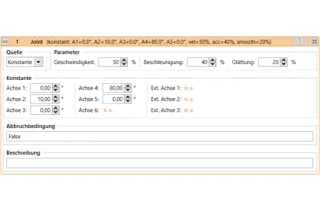
Axis movements
The Joint command moves the robot to an absolute target position that is specified in axis coordinates (e.g. axis angle or position of a linear axis). The resulting movement of the TCP is usually a curve and not a straight line.
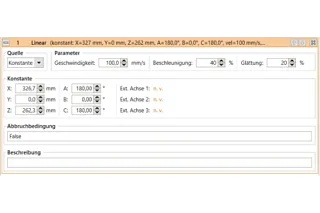
Linear movement
The Linear command moves the robot to an absolute target position specified in Cartesian coordinates. The resulting movement of the TCP follows a straight line.
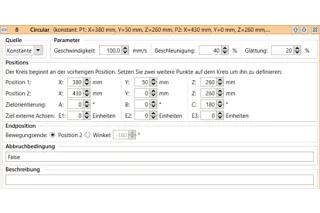
Circular movements
The instruction "Circular movement" enables movements along a full or partial circular path. It is compatible with linear movements so that the transition from and to linear movements can be smoothed over.
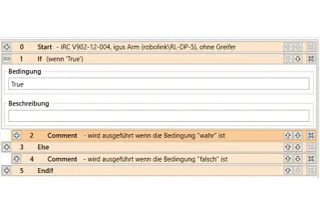
Conditions
Conditions can be used in if-then-else commands, loops and as cancellation conditions in motion commands. The conditions can be combinations of digital inputs, global signals, Boolean operations and comparisons.
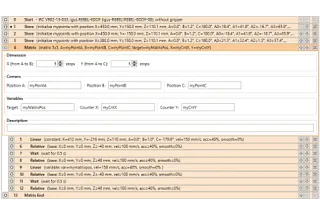
Matrix calculation
The grid instructions calculate positions aligned to a grid, e.g. as a gripping or depositing position for palletising tasks.
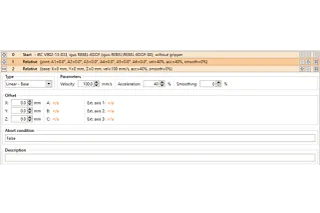
Relative
The Relative command allows you to move the robot relative to its current position. It can be accessed via the menu items under "Action" → "Relative movement".

Sub-programs
Sub-programs can be called up with the sub-command. The path to the sub-program file is specified under "File name". It is relative to the subfolder "Programs" of the iRC folder "Data".
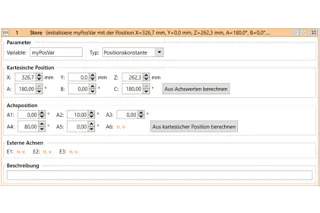
Variables and variable access
Two types of variables are supported in the program for igus Robot Control and TinyCtrl:
- Number variables: These can be used to store integer or floating point numbers.
- Position variables: These can be used to store Cartesian positions and joint positions. Whether such a variable is interpreted as a Cartesian position or joint position depends on the context.
Download robot software

The licence-free igus Robot Control software is integrated into the control system and therefore uses a standardised operating concept and consistent communication services for many components of one system. This means less project planning work and faster commissioning.
- Test all igus kinematics in advance in the software
- With pre-programmed projects for all igus robots, single axes and AGVs
- Intuitive 3D interface with simulation of the robot
Consulting
I look forward to answering your questions

Shipping and consultation
In person
Monday to Friday: 8 am – 8 pm
Saturday: 8 am – 12 pm
Chat-Service
Monday to Friday: 8 am – 5 pm
WhatsApp-Service
Monday to Friday: 8 am – 5 pm